Review -- A Human-Computer Duet System for Music Performance (Automatic Accompaniment)
In this post, A Human-Computer Duet System for Music Performance [1], by Academia Sinica, is reviewed. In this paper:
- A virtual violinist is created who can perform chamber music with a human pianist that does not need any intervention.
- The proposed system has performed in a public concert.
- Discussions of effective improvement of the system is presented.
This work is supported by the Automatic Music Concert Animation (AMCA) project of the Institute.
Outline
- Proposed Virtual Musician System
- Real-time Music Tracking
- Automatic Animation
- Discussion
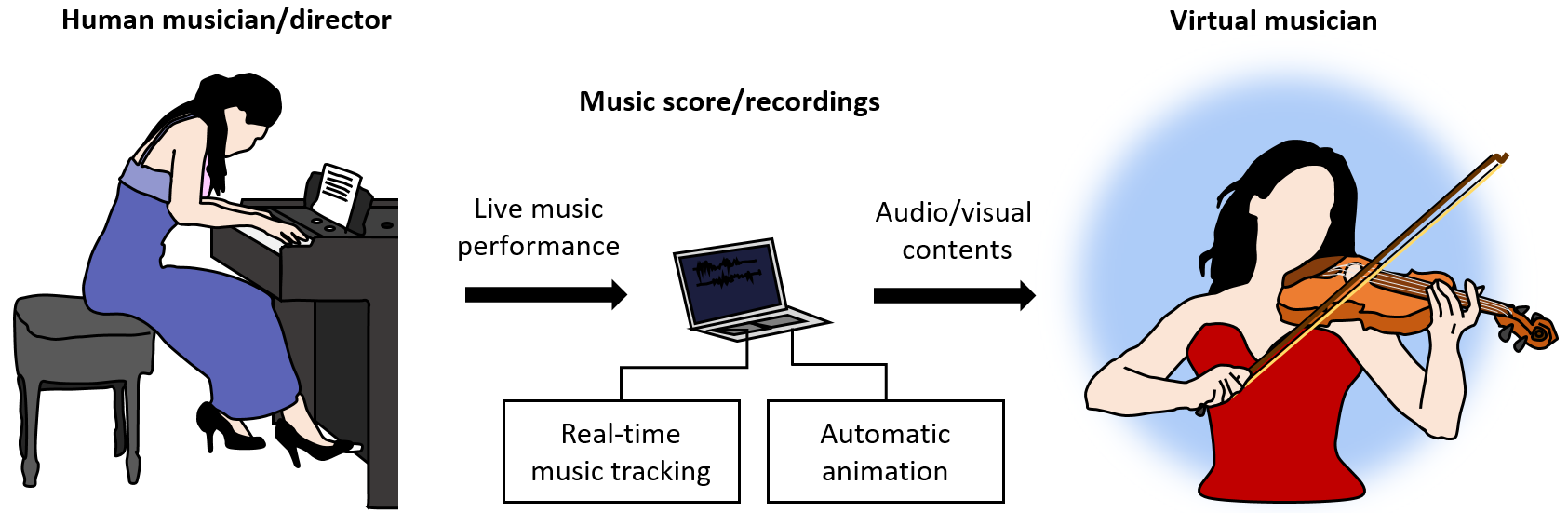
1. Proposed Virtual Musician System
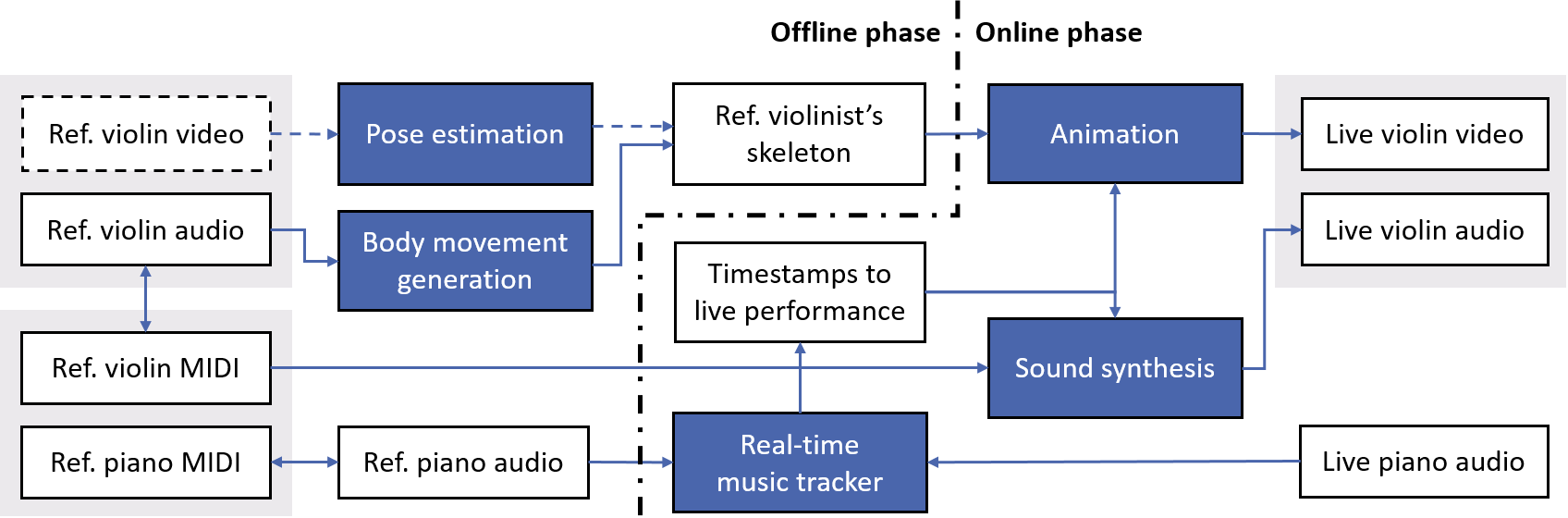
- The system has the capabilities to synchronize the reference, rehearsed, and live contents altogether.
- In the beginning, the person who is going to perform with virtual violinist selects
a music piece.
- The reference and live piano audio are aligned using the offline DTW algorithm.
- In live performance, the real-time music tracker follows the live piano audio with
the help of online DTW (ODTW) alignment.
- The music tracker then creates the visual animation and sound synthesis in order to generate the body movement and violin music of virtual violinist.
- Two approaches for generating motion ared used by automatic animation: pose estimation and music-to-motion generation techniques.
- At last, audio and motion of the virtual violinist are rendered with real-time sound synthesizer and animator.
2. Real-time Music Tracking
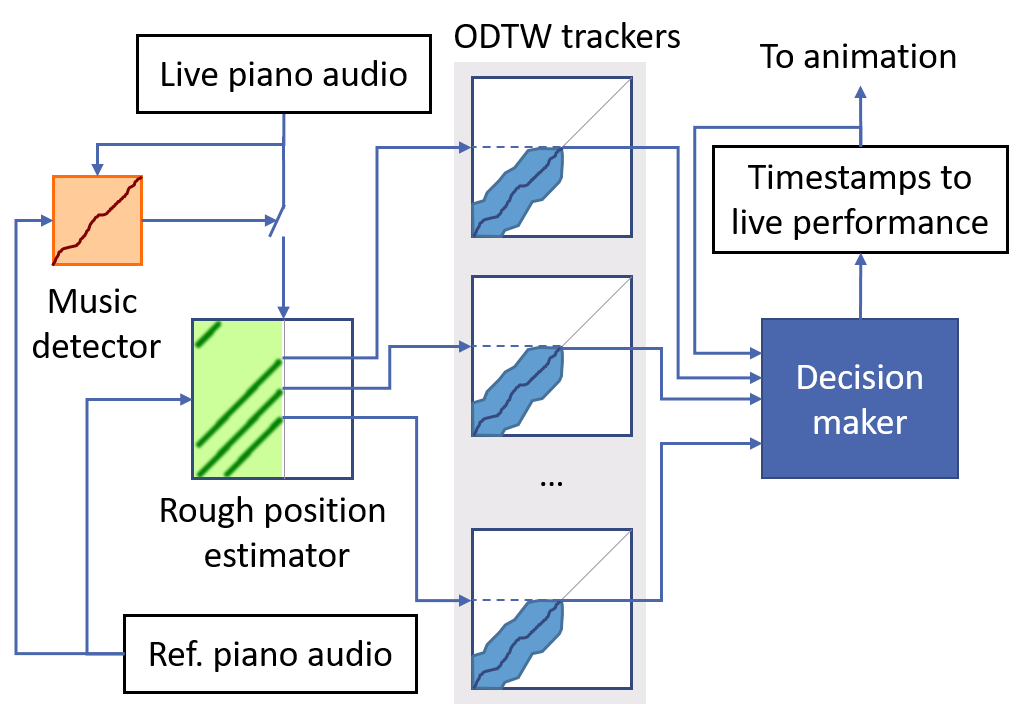
- A re-implementation of the ‘Any time’ music tracker by by Arzt and Widmer [2, 3].
- The music detector starts tracking when performance begins.
- The rough position estimator returns a collection of possible positions of the live piano signal which complies to the rehearsed piano.
- The decision maker chooses an ODTW thread as the most trusted one then output the tracking result.
3. Automatic Animation
- Pose estimation is fulfilled by using [4] to extract the 3-D position of the violinistsâĂŹ 15 body joints.
- Body movement generation, not surprisingly, needs a dataset which contains audio
as well as pose contents of violin performance for modeling the music-to-body-movement correspondence.
- Talking to generating the movement, they extend the framework of
audio-to-body (A2B) dynamics [5] into 3-dimension as shown below.
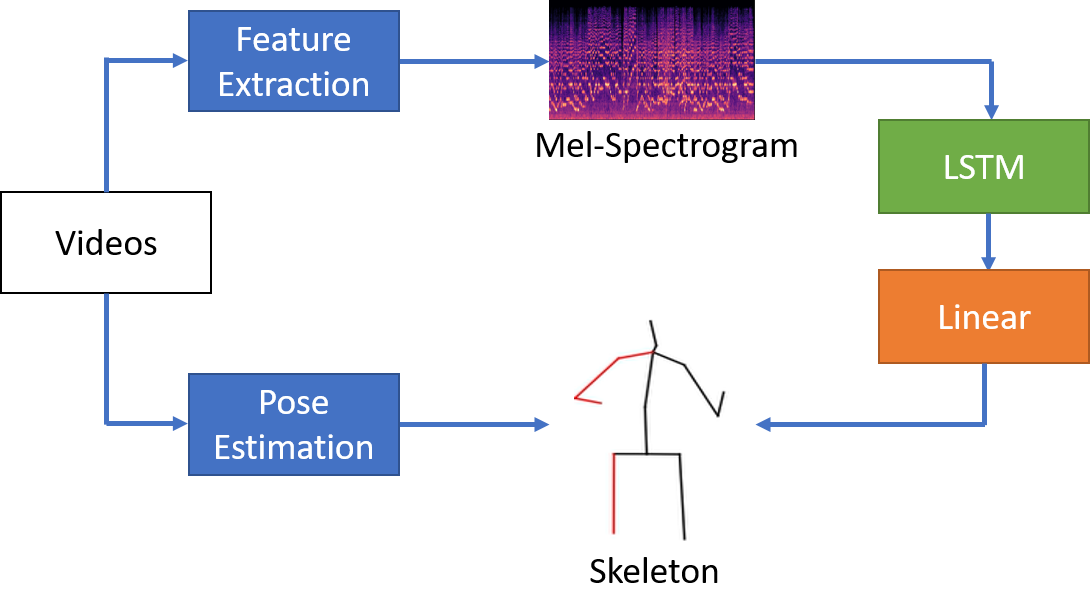
- Talking to generating the movement, they extend the framework of
audio-to-body (A2B) dynamics [5] into 3-dimension as shown below.
4. Discussion
- Thought audiences responsed the performance was insightful, there are no any
methods to make the objective evaluation of the system. As a result, they dipict
their quality assessment approach.
- The ways to improvement the system will be also discussed.
Real-time Music Tracking Evaluation
- The intuition is to measure the deviation between online music tracking and
offline alignment with the live recording with the following procedures:
- Use a multi-channel recoding device to record both live piano and violin autio.
- Compare the time mapping of the recorded live piano with the referenced
piano MIDI via offline synchronization as shown below.
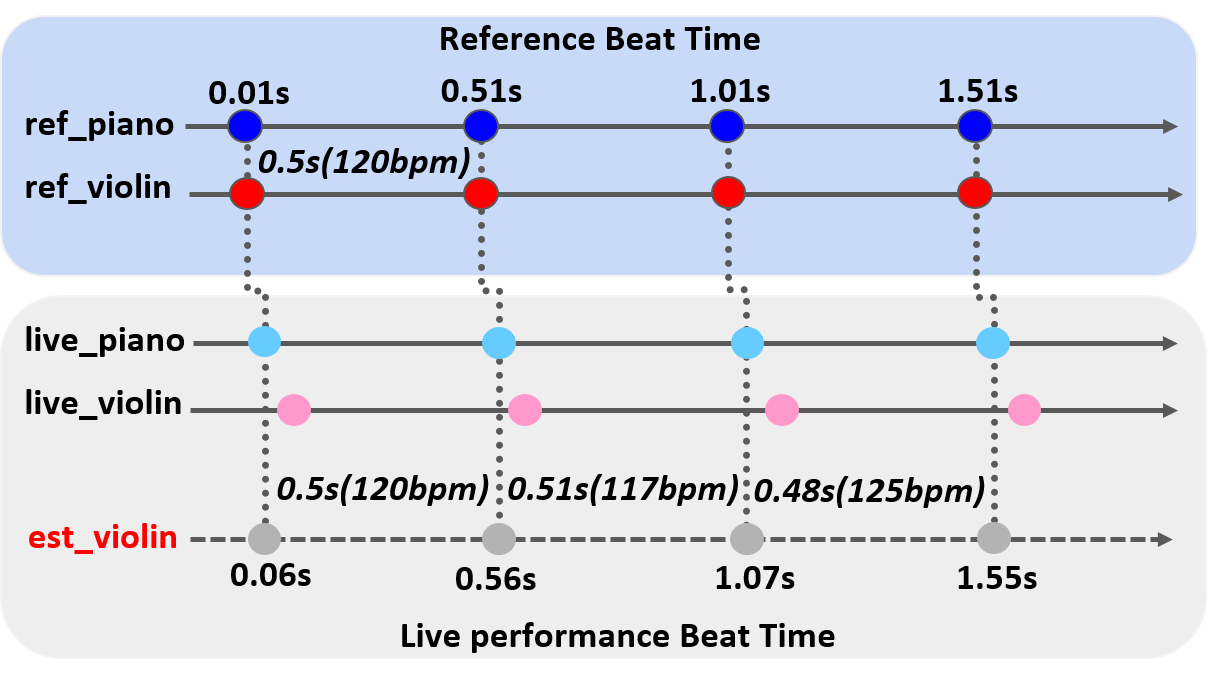
- Compare the time mapping of the live violin ad the estimated violin via offline synchronization, too.
- They use the following four criteria for evaluation:
- normal speed (115-145 bpm)
- slow speed (90-120 bpm)
- fast speed (135-175 bpm)
- accelerando speed starting with around 80bpm and ending with 160 bpm
- For all the four cases, the system takes around four measures for synchronizing with the live piano. Once it synchronizes with the human pianist, the value of deviation is ±0.25 beats.
- Also, we can observe that a sudden alteration of speed doesn’t always result
in an alteration of latency.
- As a matter of fact, the structure of music relates to latency.
Body Movement Generation Evaluation
- The model is trained and evaluated on a dataset which contains 140 violin solo
videos with total length of 11 hours.
- For training, they select the videos from one of the violinists, and conduct a 14-fold cross validation to train the 14 models.
- Each model is evaluated on the leftout piece (for that fold partition).
- The results is averaged by number of the violinists.
- L1 distance and bowing attack F1-score are used for metrics.
- L1 distance is defined by the distance between the generated and the ground-truth joints.
- In this paper, the bowing attack means s the time instance when the bowing direction changes.
- After they identify g all the true positive, false positive, and false negative of the bowing attack, they calculate the F1-score.
- We can observe the F1-scores are much better than the baseline, meaning the model is effective.
- There are still two improvements: the deviation of the right hand position and the timing of the bowing attack.
Reference
[1] https://arxiv.org/abs/2009.07816
[2] Andreas Arzt and Gerhard Widmer. Simple tempo models for real-time music tracking. In Proceedings of the Sound and Music Computing Conference (SMC), 2010
[3] Andreas Arzt and Gerhard Widmer. Towards effective ‘any-time’ music tracking. In Proceedings of the Fifth Starting AI Researchers’ Symposium, page 24, 2010.
[4] Dario Pavllo, Christoph Feichtenhofer, David Grangier, and Michael Auli. 3d human pose estimation in video with temporal convolutions and semi-supervised training. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 7753–7762, 2019.
[5] Eli Shlizerman, Lucio Dery, Hayden Schoen, and Ira Kemelmacher-Shlizerman. Audio to body dynamics. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pages 7574–7583, 2018.